
Revolutionäre Raumplanung mit ScanTheRoom
Präzision und Effizienz neu definiert
Die digitale Erfassung von Räumen stellt Architekten, Handwerker und Bauherren vor neue Herausforderungen. Herkömmliche Methoden sind oft zeitaufwendig und fehleranfällig. ScanTheRoom optimiert diesen Prozess mit modernster LiDAR-Technologie und ermöglicht die Erstellung präziser Grundrisse, begehbarer 3D-Modelle und immersiver 360°-Rundgänge in Sekunden.
Präzise Grundrisse & professionelle Raumscans
Mit einer Genauigkeit von 99,4 % verwandelt ScanTheRoom mobile Endgeräte in leistungsstarke Vermessungstools. Intuitive Bedienung sorgt für eine schnelle und einfache Erstellung von Grundrissen, ohne aufwendige manuelle Messungen. Durch den Einsatz hochmoderner LiDAR-Technologie können selbst komplexe Raumstrukturen millimetergenau erfasst werden. Eine fehlerfreie Dokumentation erleichtert die Planung und Umsetzung von Bauprojekten.
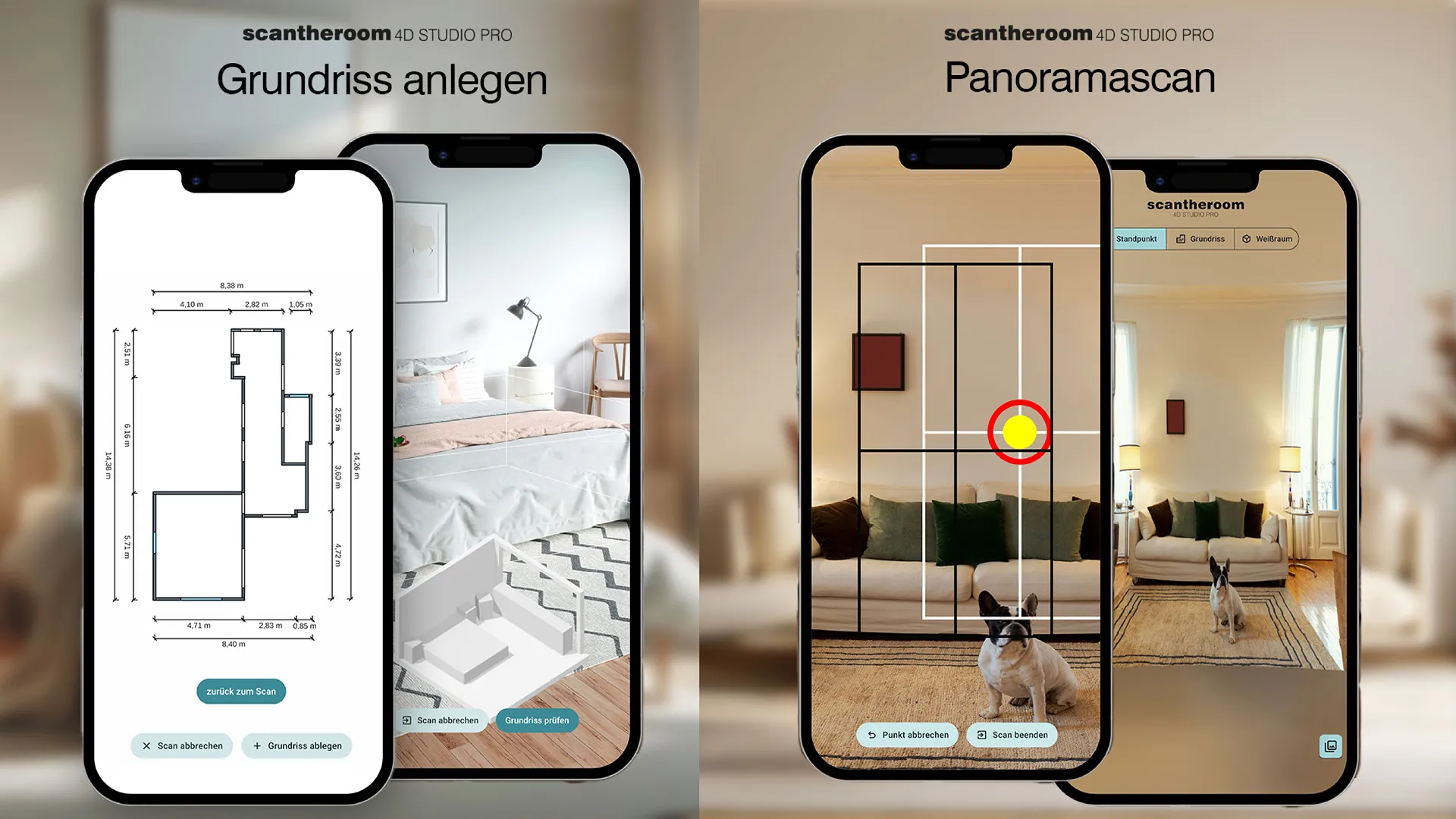
3D-Modelle, virtuelle Rundgänge & immersive Visualisierung
Gespeicherte Scans können als realistische 3D-Weißräume dargestellt werden, wobei Möbel und Einrichtungsgegenstände flexibel ein- und ausgeblendet werden können. Diese Funktion eignet sich ideal zur interaktiven Präsentation unterschiedlicher Raumkonzepte. Interaktive 360°-Rundgänge bieten die Möglichkeit, gescannte Räume aus jeder Perspektive zu betrachten – ideal für Immobilienpräsentationen oder digitale Dokumentation von Baufortschritten.
Effiziente Zusammenarbeit & vielseitiger Export
Dateiformate: Exportoptionen in gängigen Formaten wie PDF, DXF oder OBJ erleichtern die Weiterverarbeitung.
Webviewer: Plattformunabhängige Bereitstellung von Scans ermöglicht unkompliziertes Teilen mit Kunden und Kollegen.

Vielseitige Einsatzmöglichkeiten
Architektur: Virtuelle Rundgänge, exakte Grundrisse und 3D-Visualisierungen optimieren die Planung.
Handwerk: Präzise Raummaße erleichtern die effiziente Umsetzung von Projekten.
Bauplanung: Digitale Dokumentation ermöglicht eine übersichtliche Fortschrittskontrolle.
Immobilienwirtschaft: Hochwertige 360°-Visualisierungen steigern die Attraktivität von Angeboten.
Fazit: Must-Have für digitale Raumplanung
ScanTheRoom bietet eine intuitive Lösung zur schnellen und exakten digitalen Erfassung von Räumen. Von Grundrissen über 3D-Modelle bis hin zu interaktiven Rundgängen verbessert diese App die Effizienz und Qualität der Planung.
- *)
- Momentan nur für IPhone & IPad Pro Modelle verfügbar




